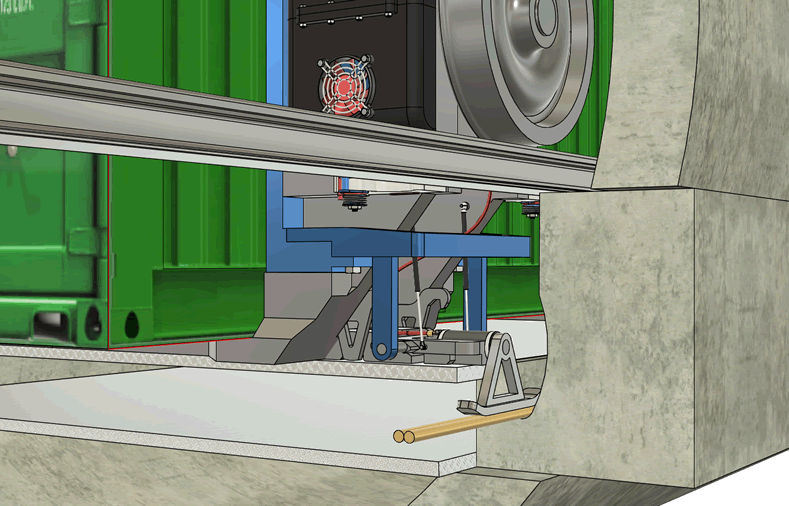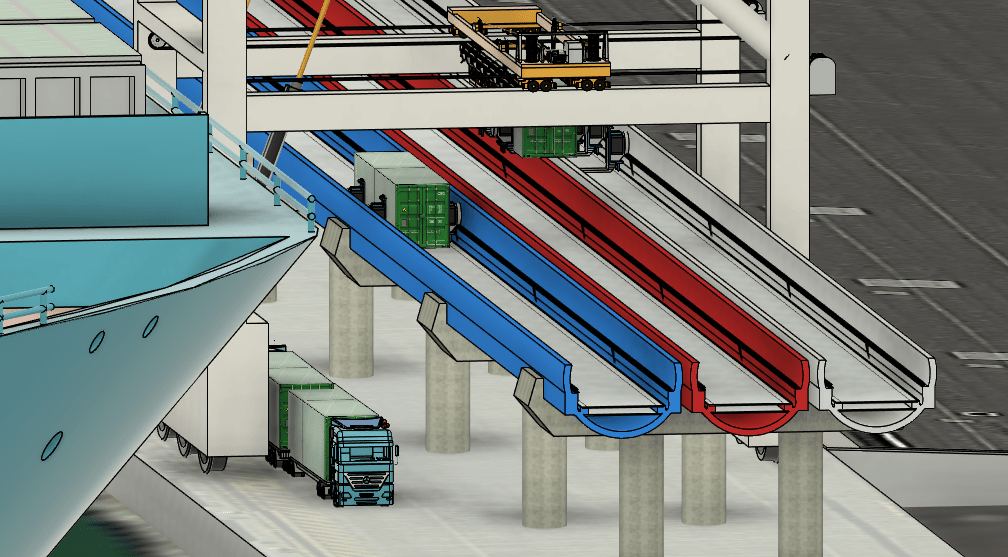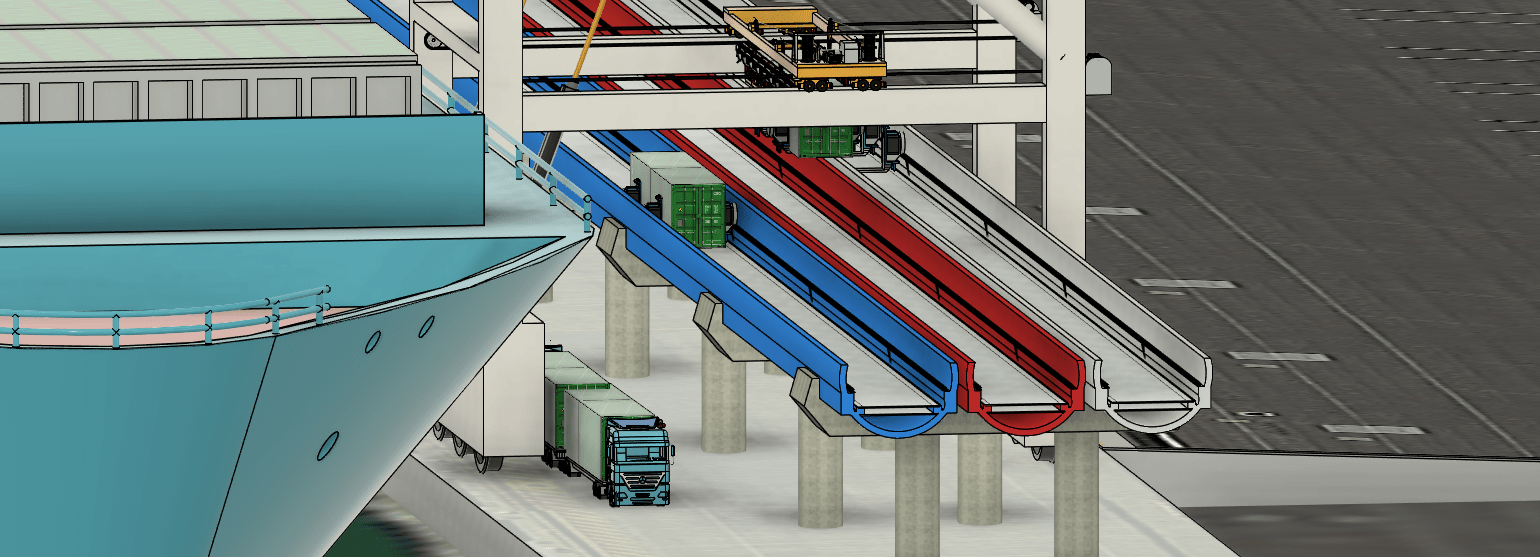
Central to the CFT design is the requirement of maximum flexibility. It should be possible to run vehicles at ground level while still in a pipe; it should be able to run above ground similar to SkyRail; and it should also be able to run underground when appropriate for the terrain. An early part of the design specified that the system be encased in a pipe. There are several advantages related to this.
At ground level, a system encased in a pipe has a relatively small footprint because the separation strip between the rail and its surroundings can be reduced to a minimum. Noise is also minimised. As with all electrified rail systems, pollution levels are almost non-existent, at least at the point of delivery. In addition, the pipe design is well suited to tunnels whenever the track needs to be routed underground.
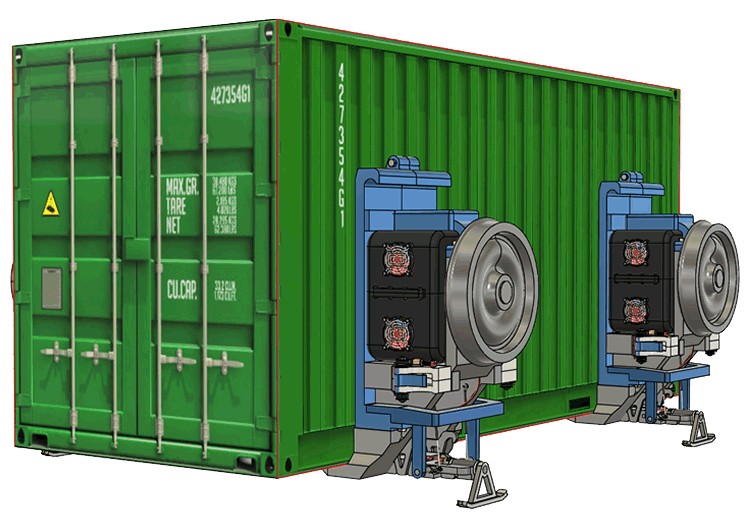
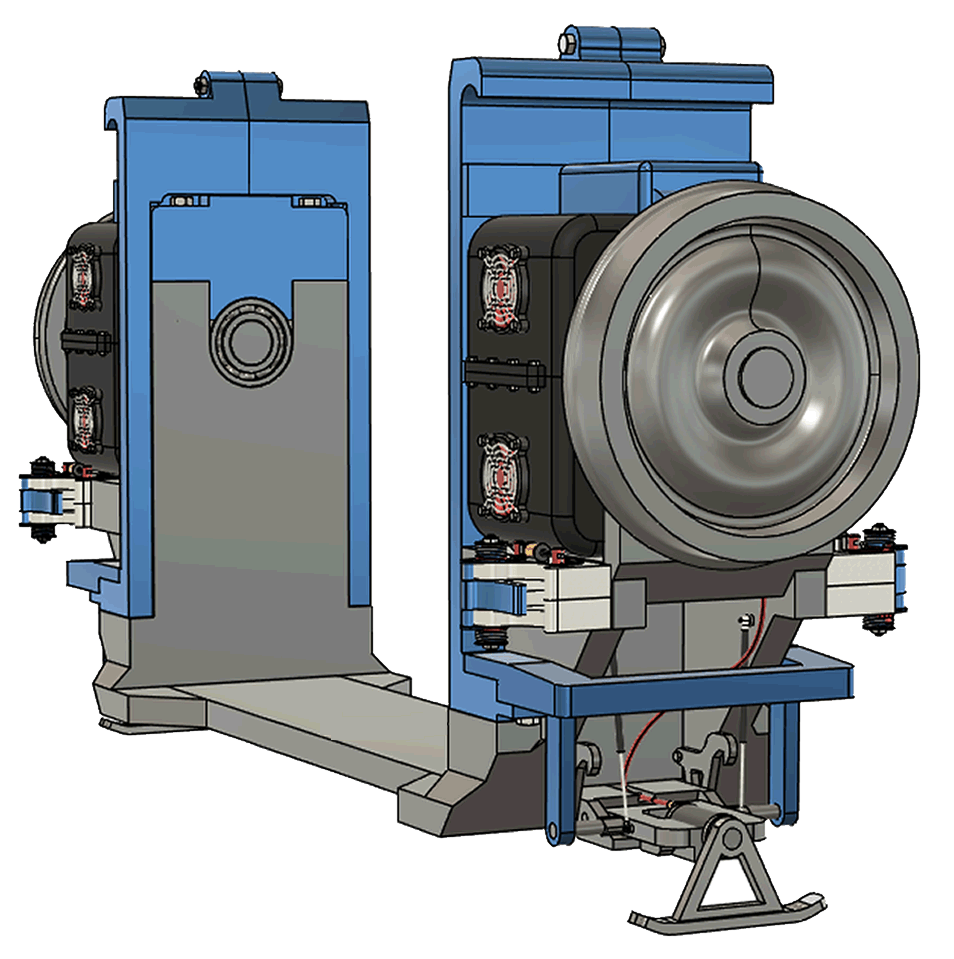
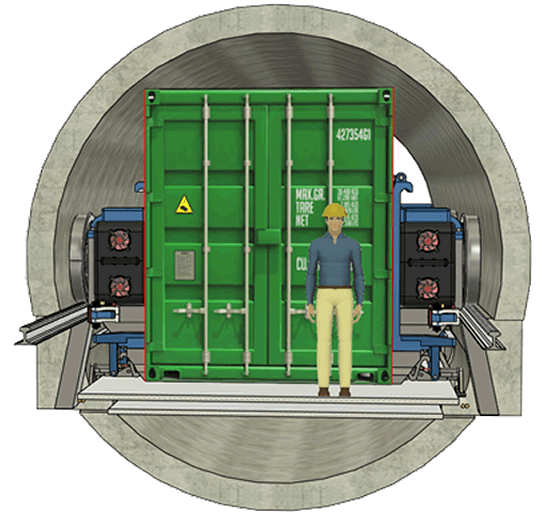
A major consideration during the early phase of the design was to analyse the cost-benefit relationship. It was important to determine which elements of the design were the best candidates for efficiency tuning so as to maximise value for all phases of the project — installation, operation, plus maintenance and refurbishment during its lifetime. One parameter identified as extremely critical, was the pipe diameter. Small variations in pipe diameter rippled through various aspects of the design and had a significant impact on installation costs. A key part of the early investigation was to determine the minimum tunnel diameter that would accommodate the larger 40-foot containers, while allowing for cornering and access for maintenance.
After much research into the way companies around the world handled containers in tunnels, there appeared to be no design that made full use of the tunnel cross-section. Most designs fell back to the traditional model with the wheels below the container. One or two implementations were a little more creative with the use of conveyor systems, but the evidence suggests there were serious limitations that prevented wider use of the technology.